📌 Quick Answer
The starting system cranks the engine fast enough for it to fire and run on its own, using the battery, ignition switch, starter motor, and solenoid.
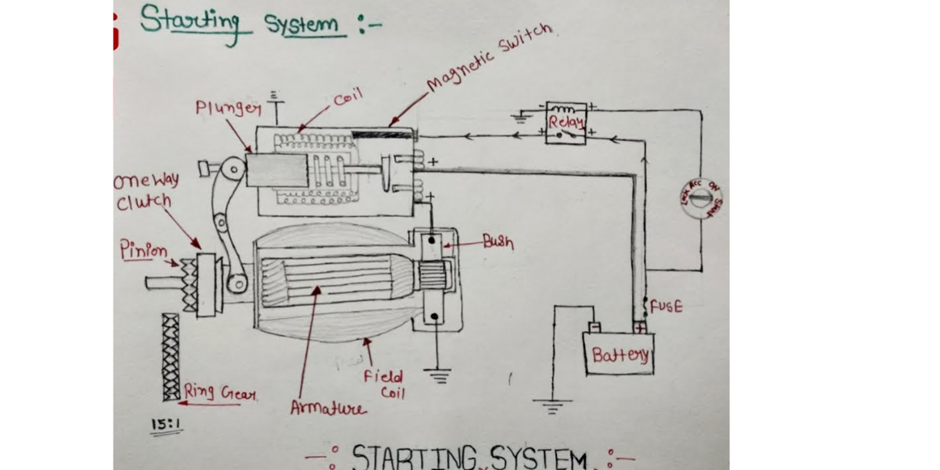
Turning the key sends current from the battery through the solenoid to the starter motor, whose pinion (via the Bendix drive) engages the flywheel ring gear to spin the engine.
🔹 Key Takeaways
- Purpose: rotate the crankshaft fast enough to start combustion.
- Components: battery, ignition switch, starter motor, solenoid, and Bendix/pinion drive.
- The solenoid is a relay that handles the starter’s high current and engages the pinion.
- The starter pinion meshes with the flywheel ring gear only while cranking.
- Needs a charged battery delivering high current for a short burst.
What Is the Starting System?
The starting system turns the engine over fast enough to begin self-sustaining combustion. An internal-combustion engine cannot start itself, so an electric starter motor, powered by the battery, spins the crankshaft until the engine fires.
Components and Working
The main parts are the battery, ignition switch, starter solenoid, and starter motor with its drive pinion. When the key is turned to ‘start’, a small current energises the solenoid, which closes a heavy contact to send the battery’s high current to the starter motor and pushes the pinion into mesh with the flywheel ring gear via the Bendix drive. The motor cranks the engine; once it fires, the pinion disengages and the system switches off.
Frequently Asked Questions
What are the components of an automobile starting system?
The battery, ignition switch, starter solenoid, starter motor, and the drive pinion (Bendix drive) that engages the flywheel ring gear.
What is the function of the starter solenoid?
It acts as a heavy-duty relay: a small switch current makes it close a high-current contact to the starter motor, and it also helps push the pinion into mesh with the flywheel.
Why does the engine need a starting system?
An internal-combustion engine cannot begin running on its own, so the starter motor must crank the crankshaft fast enough for fuel to ignite and the engine to run independently.
Related Topics on EngineeringHulk
- 👉 https://engineeringhulk.com/bendix-drive-in-automobile-engineering/
- 👉 https://engineeringhulk.com/lead-acid-battery-in-automobiles/
- 👉 https://engineeringhulk.com/alternator-in-automobile-engineering/
- 👉 https://engineeringhulk.com/battery-charging-methods-in-automobiles/