Total Station, GPS & Remote Sensing in Surveying
EDM Principle, GPS Segments, DGPS, Satellite Imagery, GIS Basics & GATE Questions
Last Updated: April 2026 | GATE CE 2025–2027
📌 Key Takeaways
- Total Station = Electronic Theodolite + EDM + data recorder; measures angles and distances simultaneously.
- EDM measures distances by phase comparison of emitted and reflected electromagnetic waves.
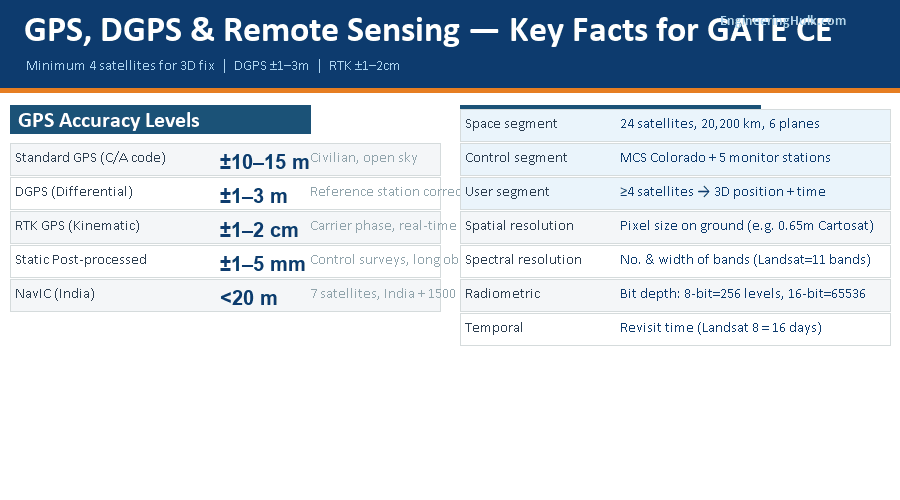
- GPS has 3 segments: Space (24 satellites), Control (master + monitor stations), User (receivers).
- Minimum 4 satellites needed for 3D position fix (3 for position + 1 for time correction).
- DGPS accuracy: ±1–3 m (from ±15 m for standard GPS); RTK achieves ±1–2 cm.
- Remote sensing: passive (reflected sunlight) vs active (RADAR, LiDAR — own energy source).
- Four resolution types: spatial, spectral, radiometric, temporal.
1. Electronic Distance Measurement (EDM)
EDM instruments measure distances by determining the phase difference between an emitted electromagnetic wave and its reflection from a prism (retro-reflector) at the target. The fundamental principle: Distance = (nλ + Δλ/2) / 2, where λ = wavelength of the carrier wave, n = whole number of wavelengths, Δλ = fractional wavelength.
| Type | Carrier Wave | Range | Application |
|---|---|---|---|
| Microwave (Tellurometer) | Microwave (10 GHz) | Up to 100 km | Geodetic surveys, triangulation |
| Light wave (Geodimeter) | Visible/Infrared | Up to 60 km | Engineering surveys |
| Laser (Total Station EDM) | Near-IR laser (850 nm) | 1–5 km (prism), 200 m (reflectorless) | Standard engineering surveys |
Modern EDM instruments achieve accuracy of ±(3 mm + 3 ppm), meaning a 3 mm constant error plus 3 mm per km measured. Atmospheric corrections (temperature, pressure) and prism constant corrections must be applied for precise work.
2. Total Station
A Total Station integrates an electronic theodolite, an EDM, a microprocessor, and a data storage unit into one instrument. In a single setup, it simultaneously measures horizontal angle, vertical angle, and slope distance, then automatically computes horizontal distance, vertical distance, and coordinates (E, N, Z) of the target.
Key features:
- Angle measurement: Electronic circle (incremental or absolute encoding) — no vernier required; least count typically 1″ or 5″.
- Distance measurement: Built-in EDM using laser; prism or reflectorless mode.
- Data storage: Internal memory or external data collector; eliminates field book errors.
- On-board software: Traverse computation, resection, setting out (stake-out), area computation, remote elevation measurement (REM).
- Robotic Total Station: Motorised version that automatically tracks a prism — one operator can perform the entire survey.
Setting out with Total Station: Enter the design coordinates of each point. The instrument calculates and displays the angle and distance to go. The surveyor walks with the prism until the display reads zero — the exact design point is located. This replaces the traditional offset/bearing method and eliminates cumulative errors.
3. GPS — Global Positioning System
GPS (NAVSTAR-GPS) is a satellite-based radio navigation system operated by the US Department of Defense. It provides continuous position, velocity, and time information anywhere on Earth.
| Segment | Components | Function |
|---|---|---|
| Space | 24 satellites (21 active + 3 spare) in 6 orbital planes, altitude 20,200 km, period ~12 h | Transmit navigation signals (L1 at 1575.42 MHz, L2 at 1227.60 MHz) |
| Control | Master Control Station (Colorado) + 5 monitor stations + 3 ground antennas | Track satellite health, update ephemeris & clock data, upload corrections |
| User | GPS receivers (handheld, survey-grade, embedded) | Receive signals from ≥4 satellites; compute position, altitude, time |
Position fix: Each satellite transmits its location and the exact time of signal transmission. The receiver measures the travel time and computes the pseudo-range. With 3 satellites, 2D position is obtained; with 4 satellites, full 3D position (latitude, longitude, altitude) and receiver clock correction are computed.
Indian Regional Navigation Satellite System (IRNSS / NavIC): India’s own navigation system with 7 satellites (3 geostationary + 4 geosynchronous) covering the Indian subcontinent and surrounding region up to 1500 km. Accuracy: <20 m. GATE has started asking about NavIC since 2022.
4. DGPS & RTK
GPS Accuracy Comparison
Standard GPS (C/A code): ±10–15 m horizontal
DGPS (Differential GPS): ±1–3 m horizontal
RTK GPS (Real-Time Kinematic): ±1–2 cm horizontal
Post-processed static GPS (long observation): ±1–5 mm
DGPS principle: A reference receiver at a known position continuously computes the difference between its known coordinates and the GPS-computed coordinates. This difference (correction vector) is broadcast to all nearby roving receivers. Errors common to both receivers (satellite clock, atmospheric delay, orbital errors) are eliminated — the remaining errors are small.
RTK (Real-Time Kinematic) GPS: Uses both code and carrier phase measurements. The reference station transmits not just position corrections but full carrier phase observations. The rover receiver resolves the integer ambiguity (number of complete wavelengths in the signal path) to achieve centimetre accuracy in real time. Used for precise setting-out, monitoring, and machine guidance.
5. Remote Sensing
Remote sensing is the acquisition of information about an object without physical contact. In civil engineering, it refers to acquiring Earth surface data using sensors mounted on aircraft or satellites. The electromagnetic spectrum used ranges from UV (0.3 μm) through visible (0.4–0.7 μm), near-IR (0.7–1.3 μm), mid-IR (1.3–8 μm), thermal-IR (8–14 μm), to microwave (1 mm–1 m).
Interaction with atmosphere: The atmosphere absorbs and scatters EMR. Sensors are designed to operate in atmospheric windows — wavelength ranges where atmospheric absorption is low (0.4–0.7 μm, 0.8–0.9 μm, 1.55–1.75 μm, 3.5–5.5 μm, 8–14 μm, 1–30 cm).
Interaction with Earth surface: Energy incident on a surface is: Reflected + Absorbed + Transmitted = 1. Spectral reflectance curves are unique for different surfaces (vegetation, water, soil, urban) — this is the basis for classification and feature extraction.
6. Platforms & Sensors
| Satellite/Platform | Country | Spatial Resolution | Application |
|---|---|---|---|
| Landsat 8/9 (OLI+TIRS) | USA | 15–30 m (pan–multispectral) | Land use, agriculture, forestry |
| SPOT 6/7 | France | 1.5–6 m | Urban mapping, cadastral |
| IRS-P6 (ResourceSat) | India | 5–56 m | Land resources, disaster management |
| Cartosat-2 series | India | 0.65 m | High-resolution mapping, urban planning |
| IKONOS / WorldView | USA | 0.31–1 m | Detailed urban mapping |
| Sentinel-1 (SAR) | ESA | 5–20 m | Flood monitoring, subsidence (RADAR) |
7. Resolution Types
| Resolution Type | Definition | Example |
|---|---|---|
| Spatial | Size of the smallest discernible feature (pixel size on ground) | Cartosat-2: 0.65 m; Landsat: 30 m |
| Spectral | Number and width of spectral bands; narrower bands → better material discrimination | Landsat 8: 11 bands (0.43–12 μm); Hyperion: 220 bands (hyperspectral) |
| Radiometric | Number of brightness levels (bit depth); more bits → finer tonal gradation | 8-bit = 256 levels; 16-bit = 65,536 levels |
| Temporal | Time between successive observations of the same area (revisit period) | Landsat 8: 16 days; Sentinel-1: 6 days; Cartosat: 5 days |
8. GIS — Geographic Information System
A GIS is an integrated system for capturing, storing, querying, analysing, and displaying geographically referenced data. It links spatial data (maps, satellite images, GPS coordinates) with attribute data (tabular information about features).
| Component | Vector Data | Raster Data |
|---|---|---|
| Representation | Points, lines, polygons | Grid of cells (pixels) with values |
| Storage | Compact for discrete features | Large files for continuous data |
| Examples | Roads, buildings, property boundaries | Satellite images, DEMs, land use grids |
| Analysis strength | Network analysis, overlay, buffering | Terrain analysis, surface modelling, interpolation |
Key GIS operations in civil engineering: Terrain analysis (slope, aspect, watershed delineation from DEM), network analysis (shortest path, routing), spatial overlay (finding areas satisfying multiple criteria), buffer analysis (finding features within a distance), and interpolation (IDW, Kriging) for creating continuous surfaces from point data.
Digital Elevation Model (DEM): A raster dataset representing ground elevation. Used to extract contours, compute cut-and-fill volumes, delineate drainage basins, and plan alignments. SRTM (90 m global) and Cartosat DEM (30 m for India) are commonly used.
9. GATE-Level Questions & Answers
Q1 — GPS Minimum Satellites (GATE 2019)
The minimum number of GPS satellites required for a 3D position fix is:
Answer: 4 — 3 satellites determine a sphere of possible positions; the 4th satellite resolves the time ambiguity and gives a unique 3D position.
Q2 — EDM Accuracy
An EDM instrument has accuracy ±(5 mm + 5 ppm). What is the error in measuring a distance of 2 km?
Solution: Constant error = 5 mm = 0.005 m. Proportional error = 5 ppm × 2000 m = 5 × 10⁻⁶ × 2000 = 0.010 m. Total error = ±√(0.005² + 0.010²) = ±√(0.000025 + 0.0001) = ±√0.000125 = ±0.011 m.
Q3 — Remote Sensing (GATE 2022 type)
A satellite image has 8-bit radiometric resolution. What is the total number of grey levels available?
Answer: 2⁸ = 256 grey levels. If upgraded to 12-bit, 2¹² = 4096 levels — finer discrimination of surface reflectance.
Common Mistakes
- Saying 3 satellites are enough for GPS fix: 3 satellites give a 2D fix only. A 4th satellite is essential for 3D position and to resolve the receiver clock error — always state 4 for complete GATE answers.
- Confusing spatial and spectral resolution: Spatial = pixel size (smaller pixel = finer spatial resolution). Spectral = number/width of bands (more/narrower bands = finer spectral resolution). Students often mix these up.
- Assuming RADAR is passive: RADAR is an active system — it emits its own microwave pulses. Only optical sensors (Landsat, SPOT, IRS) are passive.
- Ignoring prism constant in EDM: The prism (retro-reflector) introduces an optical path offset (typically −30 mm to −40 mm). This must be entered into the Total Station before measurement — otherwise all distances are systematically in error.
- Confusing DEM with DSM: DEM (Digital Elevation Model) represents bare ground elevation. DSM (Digital Surface Model) represents the top surface including buildings and vegetation. LiDAR can produce both by filtering point returns.
Frequently Asked Questions
What are the three segments of the GPS system?
Space segment (24 satellites at 20,200 km altitude), Control segment (Master Control Station + 5 monitor stations), User segment (GPS receivers). Minimum 4 satellites needed for 3D fix.
What is DGPS and how does it improve GPS accuracy?
A reference receiver at a known point computes GPS errors and broadcasts corrections. Standard GPS: ±15 m. DGPS: ±1–3 m. RTK (carrier phase): ±1–2 cm. DGPS eliminates common-mode errors (atmospheric, satellite clock, orbit) affecting both reference and rover.
What is the difference between active and passive remote sensing?
Passive sensors detect reflected sunlight or emitted thermal radiation (Landsat, SPOT, IRS). Active sensors emit their own energy and detect the return (RADAR, LiDAR). Active sensors work day/night and through clouds; passive sensors need sunlight and are affected by cloud cover.
What are the four types of resolution in remote sensing?
Spatial (pixel size), Spectral (number/width of bands), Radiometric (grey levels = 2^bit depth), Temporal (revisit frequency). Each measures a different aspect of sensor capability.